
Hi.
I build systems that understand the world, and I climb mountains to experience it.
Based in Shanghai, I am a Ph.D. researcher specializing in Robotics, SLAM, and multi-sensor fusion. My work is driven by a first-principles approach to solving complex spatial problems, from algorithms to hardware deployment.
If you are interested in pushing the SOTA in robotics or looking for a reliable roped-party member for an upcoming alpine ascent, feel free to reach out.
🔥 News
- 2026.02: 🎉 DynamicVGGT, GIFT, MacTok, and DINO-VO are accepted by CVPR 2026.
- 2026.01: 🎉 PAPL-SLAM is accepted by ICRA 2026.
- 2026.01: 🎉 ARTDECO is accetped by ICLR 2026.
- 2025.12: 🎉 Summited the Third Peak of Gangshka (5005 m) in temperatures below –40°C.
- 2025.09: 🎉 OrderMind and GOOD are accepted by NeurIPS 2025.
- 2025.07: 🎉 PAPL-SLAM is accepted by IEEE Robotics and Automation Letters.
- 2025.06: 🎉 Dark-ISP is accepted by ICCV 2025.
- 2025.06: 🎉 FusionMap is accepted by IEEE Transactions on Artificial Intelligence.
- 2025.06: 🎉 EC-SLAM is accepted by Pattern Recognition.
- 2025.03: 🎉 JointDeblur-GS is accepted by ICME 2025.
- 2024.12: 🎉 🏔️ After relentless efforts, our four-person team successfully trekked over 30 km in two days and one night through an environment with temperatures below –30°C and snow reaching our thighs, ultimately summiting the Gangshka Main Peak in Qinghai Province at an elevation of 5254.5 m. We are incredibly proud of all our team members!
- 2024.03: 🎉 VPL-SLAM is accepted by IEEE Transactions on Intelligent Transportation Systems.
- 2024.01: 🎉 Multi-Lio is accepted by ICRA 2024.
📝 Selected Studies on SLAM
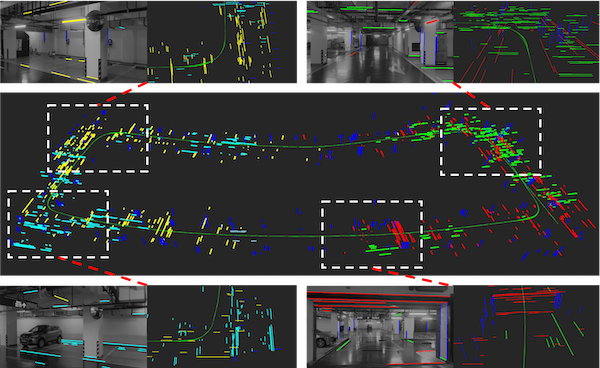
PAPL-SLAM: Principal Axis-Anchored Monocular Point-Line SLAM
Guanghao Li*, Yu Cao*, Qi Chen*, Xin Gao, Yifan Yang, Jian Pu
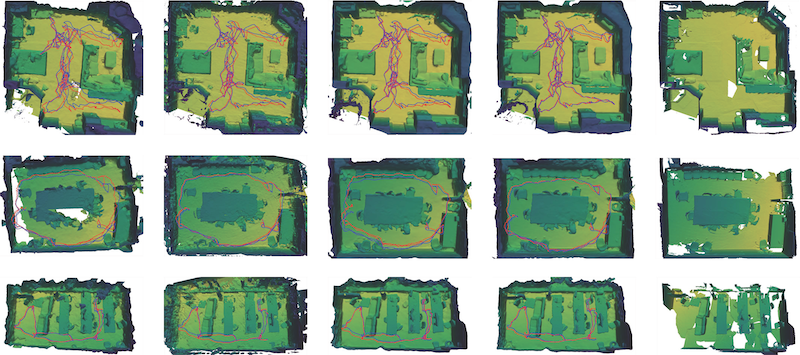
- PAPL-SLAM is a point-line SLAM system that efficiently integrates line structural information and optimization by anchoring lines to a principal axis, reducing the number of parameters, and utilizing probabilistic data association, enabling robust, rapid, and accurate mapping and tracking in both indoor and outdoor environments.
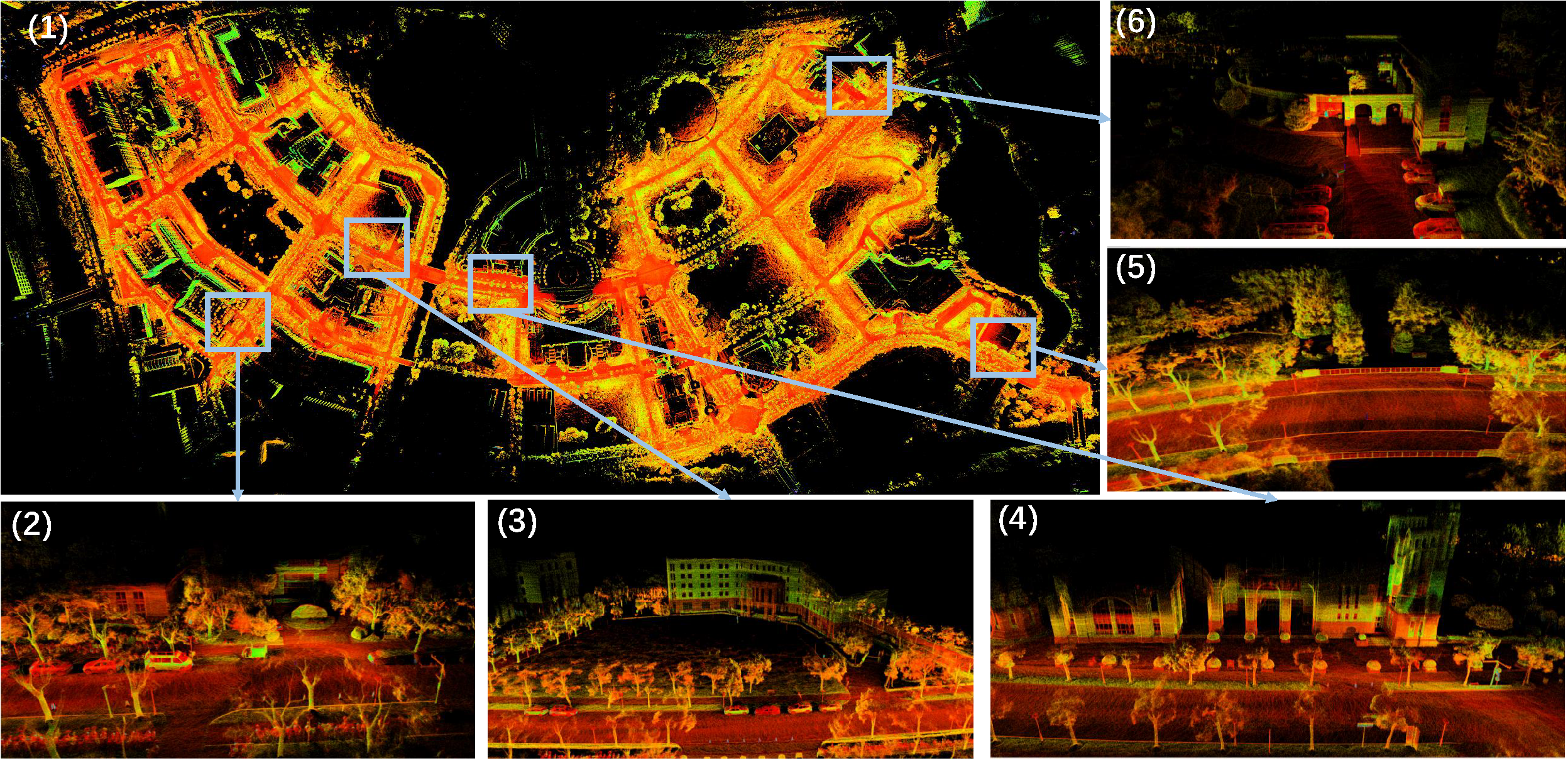
Multi-LIO: A Lightweight Multiple LiDAR-Inertial Odometry System
Qi Chen*, Guanghao Li*, Xiangyang Xue, Jian Pu
- Multi-LIO is a real-time, computationally efficient multiple LiDAR-inertial odometry system that enhances accuracy and scalability, using parallel state updates, voxelized maps, and point-wise uncertainty estimation to improve scan-to-map registration in large-scale, complex environments.
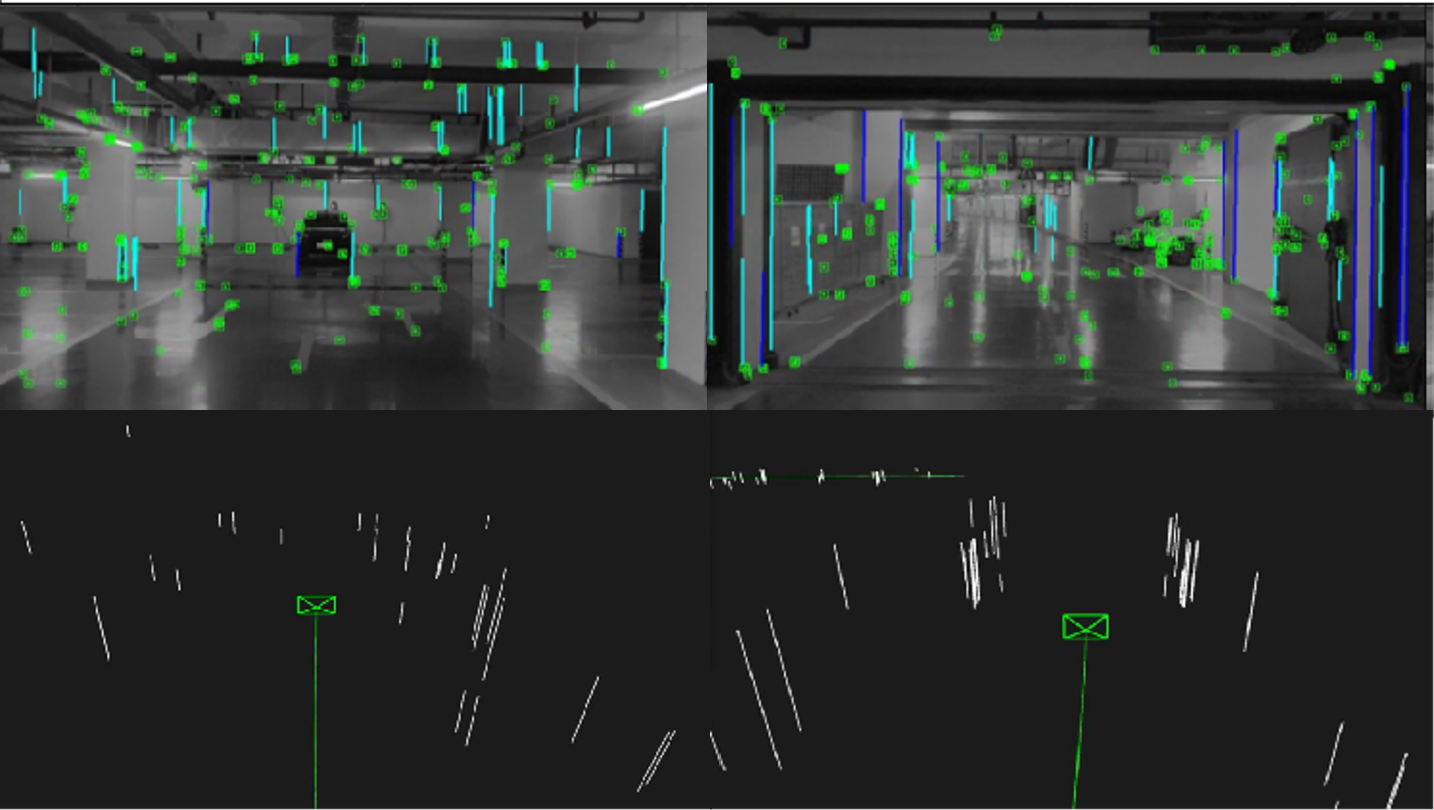
VPL-SLAM: A Vertical Line Supported Point Line Monocular SLAM System
Qi Chen, Yu Cao, Jiawei Hou, Guanghao Li, Bo Chen, Xiangyang Xue, Hong Lu, Jian Pu
- VPL-SLAM is a monocular SLAM system that improves localization and mapping in complex environments by integrating structural vertical lines with point-line features.
📝 Selected Studies on 3D Reconstruction

Guanghao Li*, Kerui Ren*, Linning Xu, Zhewen Zheng, Changjian Jiang, Xin Gao, Jian Pu, Mulin Yu, Jiangmiao Pang


- ARTDECO unifies 3D foundation priors with structured scene representations, enabling robust and generalizable 3D reconstruction of diverse real-world scenes using only monocular video.
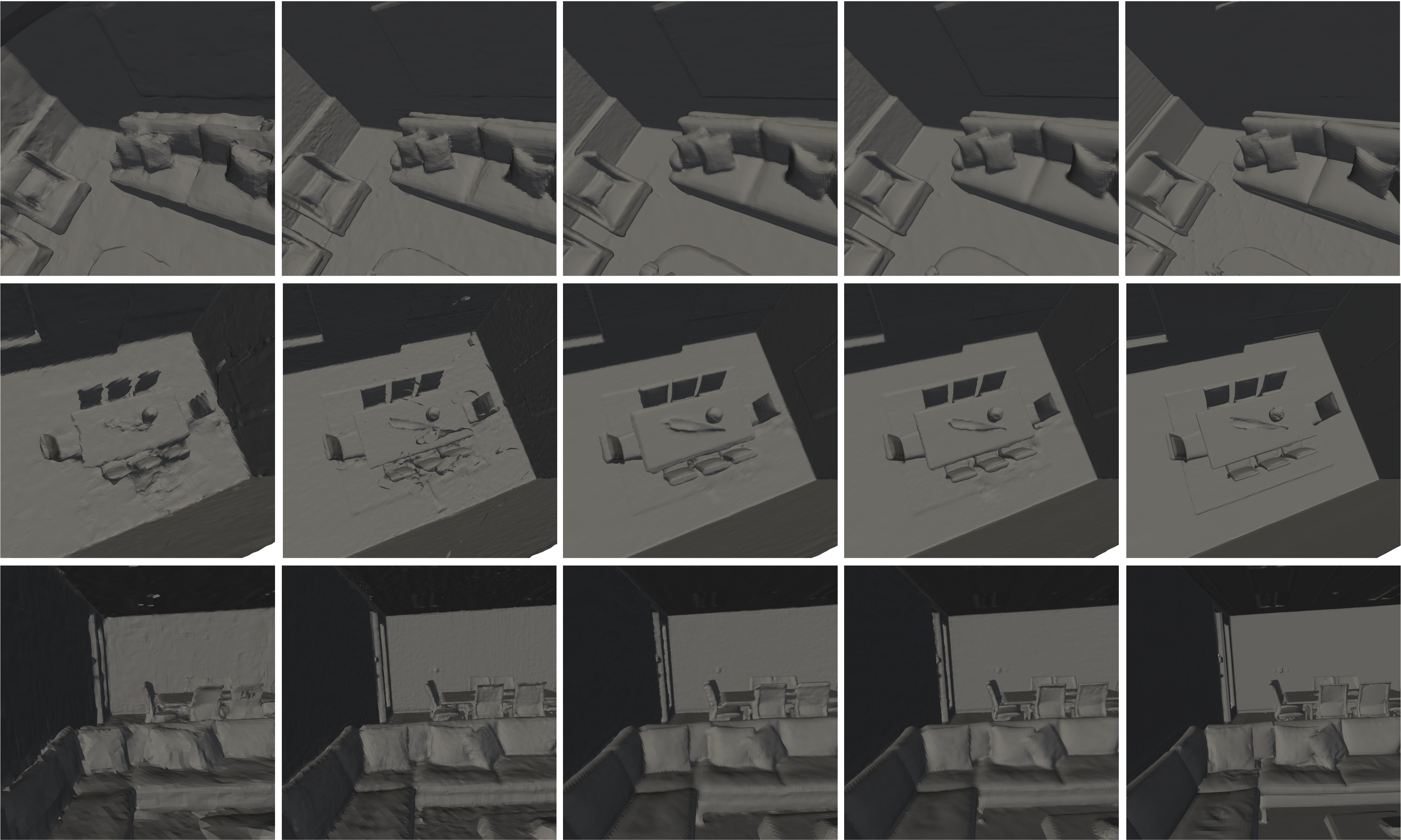
Constrained Gaussian Splatting via Implicit TSDF Hash Grid for Dense RGB-D SLAM
Guanghao Li, Qi Chen, Sijia Hu, Yuxiang Yan, Jian Pu
- FusionMap is an advanced SLAM system that combines explicit 3DGS and implicit NeRF representations to improve surface reconstruction accuracy. By addressing the limitations of traditional 3DGS, FusionMap achieves up to 30 times faster processing and a 38% accuracy boost over conventional methods. This innovation sets new standards for real-time 3D mapping and localization, enabling next-generation applications in virtual environments, autonomous navigation, and dynamic scene reconstruction.
Guanghao Li*, Qi Chen*, Yuxiang Yan, Jian Pu


- EC-SLAM is a real-time dense RGB-D SLAM system that leverages Neural Radiance Fields (NeRF) for enhanced pose optimization, using sparse parametric encodings, TSDF, and a globally constrained Bundle Adjustment strategy to improve tracking accuracy and reconstruction performance in real-time.
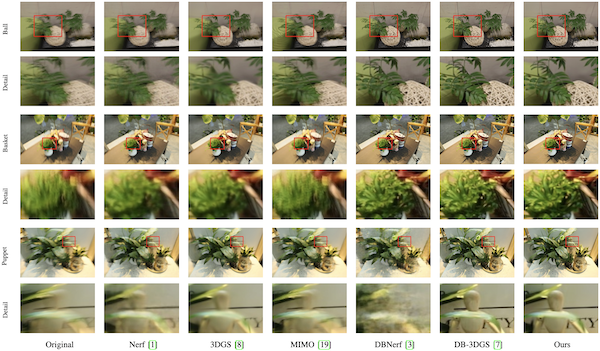
JointDeblur-GS: Joint Blur-Aware Gaussian Splatting
Sijia Hu, Peng Chen, Xinxiao Wang, Luyue Sun, Guanghao Li, Hongyu Wang, Jian Pu
- JointDeblur-GS is a joint optimization framework that integrates a blur-aware network to enhance image quality and optimize 3D Gaussian parameters for effective motion blur removal and multiview consistency, achieving superior reconstruction quality with real-time performance.
📝 Other Selected Studies
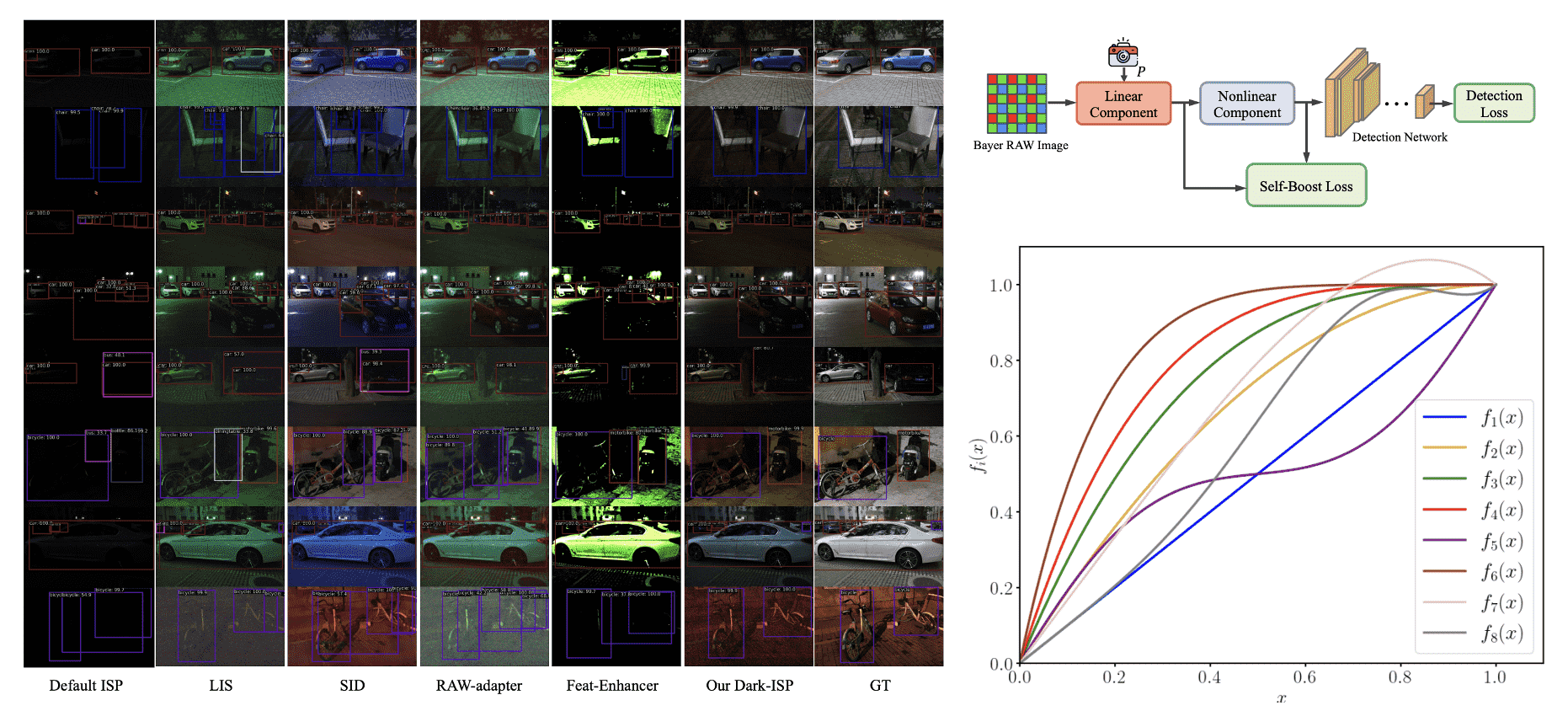
Dark-ISP: Enhancing RAW Image Processing for Low-Light Object Detection
Guo jiasheng, Xin Gao, Yuxiang Yan, Guanghao Li, Jian Pu
- Dark-ISP is a lightweight and self-adaptive Image Signal Processing (ISP) plugin designed to improve low-light object detection. Unlike previous methods that either use RAW-RGB images with information loss or complex frameworks, Dark-ISP processes Bayer RAW images directly in dark environments. Its key innovations include deconstructing conventional ISP pipelines into linear and nonlinear sub-modules optimized for task-driven losses, and a self-boosting strategy that enhances cooperation between sub-modules.
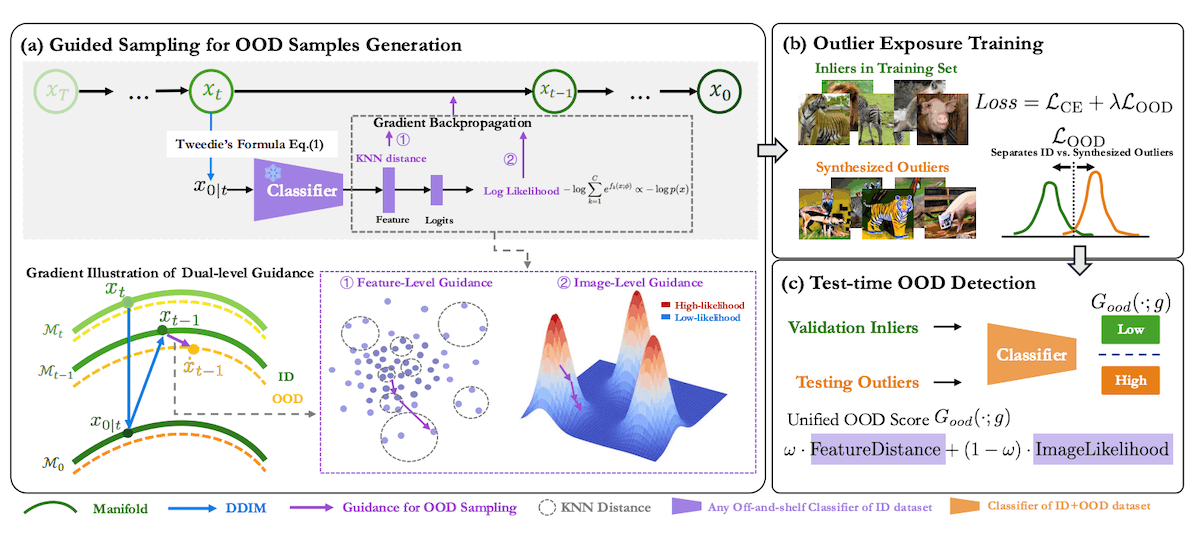
GOOD: Training-Free Guided Diffusion Sampling for Out-of-Distribution Detection
Xin Gao, Jiyao Liu, Guanghao Li, Yueming Lyu, Jianxiong Gao, Weichen Yu, Ningsheng Xu, Liang Wang, Caifeng Shan, Ziwei Liu, Chenyang Si
- GOOD is a training-free diffusion guidance framework that shapes a robust OOD/ID decision boundary. It steers sampling with two gradients—image-level toward low-density regions and feature-level toward sparse zones—to generate diverse, controllable OOD examples.
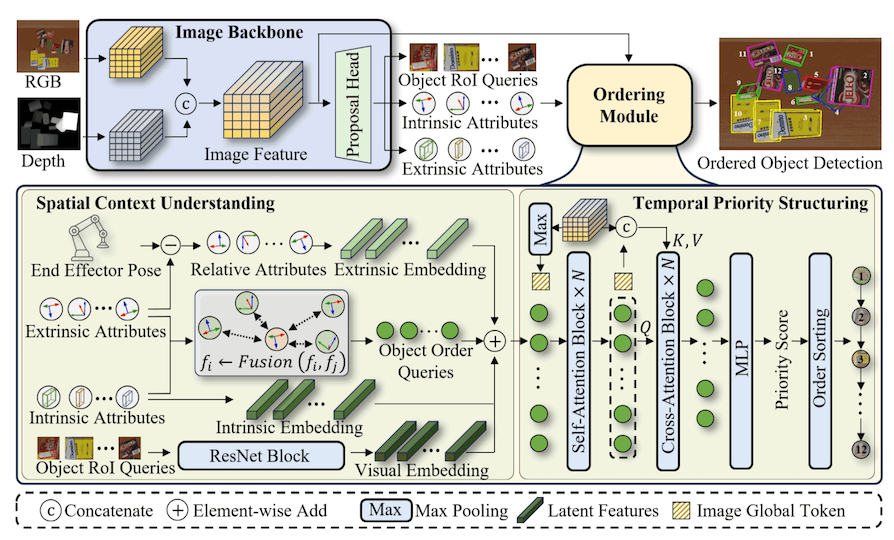
Learning Spatial-Aware Manipulation Ordering
Yuxiang Yan, Zhiyuan Zhou, Xin Gao, Guanghao Li, Shenglin Li, Jiaqi Chen, Qunyan Pu, Jian Pu
- This paper introduces OrderMind, a spatial-aware manipulation ordering framework that learns object priorities from local geometry via a kNN spatial graph and a lightweight temporal module, supervised by VLM-distilled spatial priors. It also presents the Manipulation Ordering Benchmark (163k+ samples) for cluttered scenes.